Assistant Professor Wei Li receives an NSF grant to develop a new class of vision-based tactile robots
Assistant Professor Wei Li of Stony Brook University (SBU) has recently received a three-year grant from the National Science Foundation, which aims to develop a new class of vision-based tactile robots capable of multi-physical perception.
The project, titled "Physics-empowered Vision-based Tactile Gel-Robots for Multi-physical Perception and Ultra-gentle Manipulation" is a collaborative effort between Principal Investigator (PI) Assistant Professor Shaoting Lin, at Michigan State University, and co-PIs Li of SBUand Assistant Professor Yu She of Purdue University.
Li’s expertise in photoelasticity, an experimental technique used by his group to study granular media, will be applied to develop a stress-interpreting optical system. This system will utilize the fatigue-resistant photoelastic gels developed by Lin and provide contact stress information to She’s intelligent control algorithms.
"We strive to bridge the gap between robotic tactile perception and human haptic sensing by integrating our innovative technology into the fingertips of future robots," said Li.
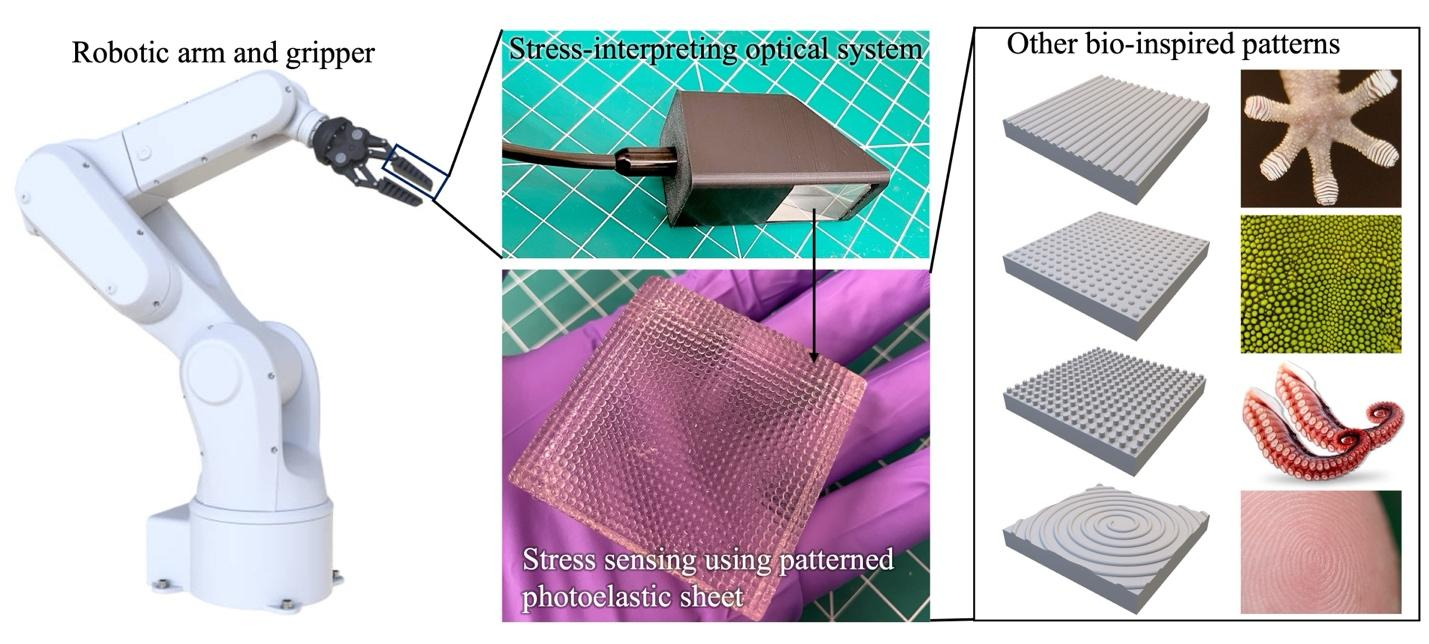
Li’s group is developing a bio-inspired stress-interpreting optical system that can be integrated into the fingertips of future robots.